So a bit of context; most of the students on the module had first degrees in either networking or software engineering; so before they start the module they are competent in programming with Javascript, HTML, CSS and PHP. Therefore the module looked to develop new areas such as introductory blockchain, virtual reality via the web (e.g. WebVR), using social media sources; but lastly looking at physical computing leading to an insight into the Internet of Things (IoT). As part of this last topic gaining some experience of programming and very simple networking was looked at using the micro:bit.
An activity was produced where:
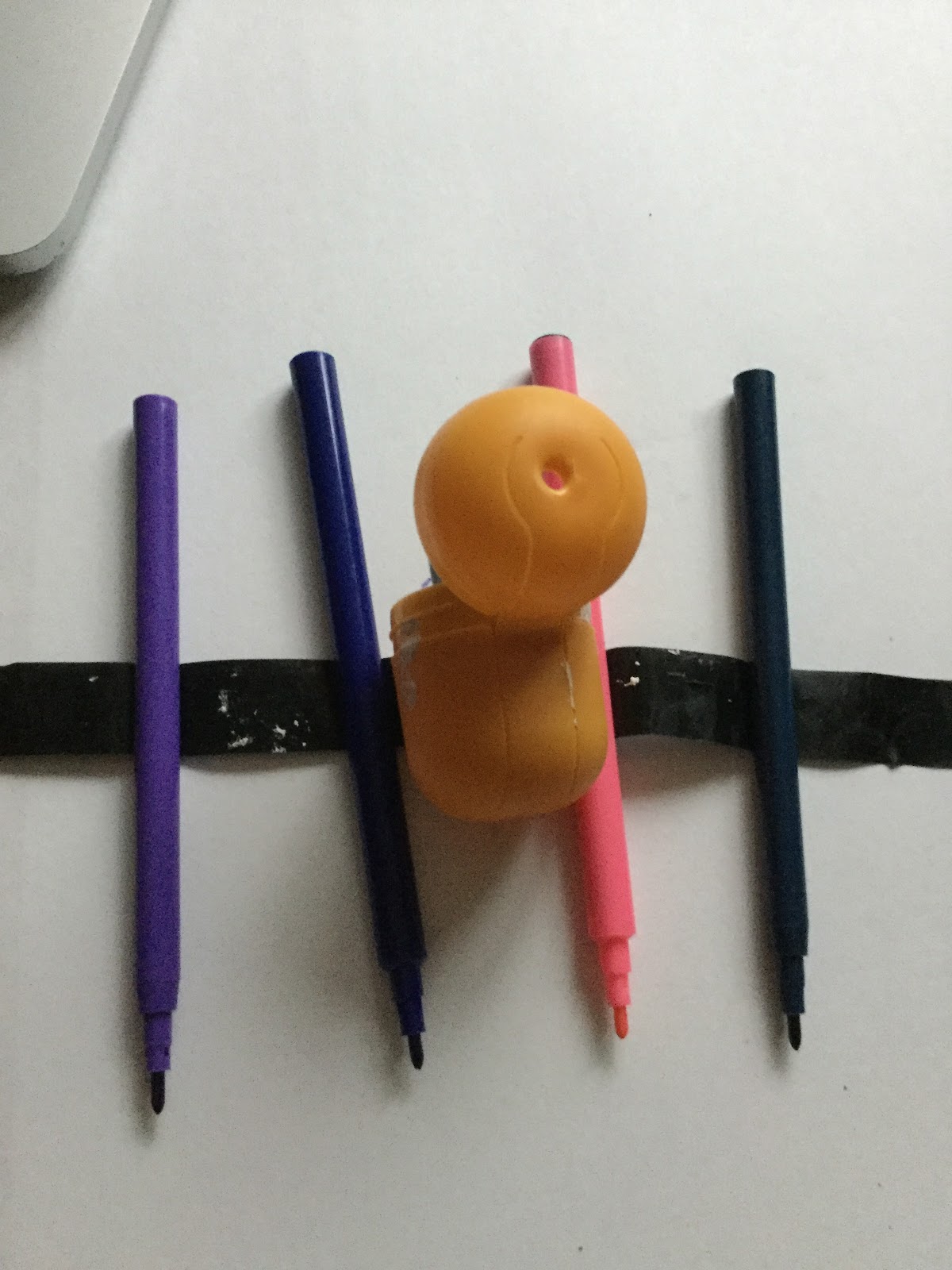
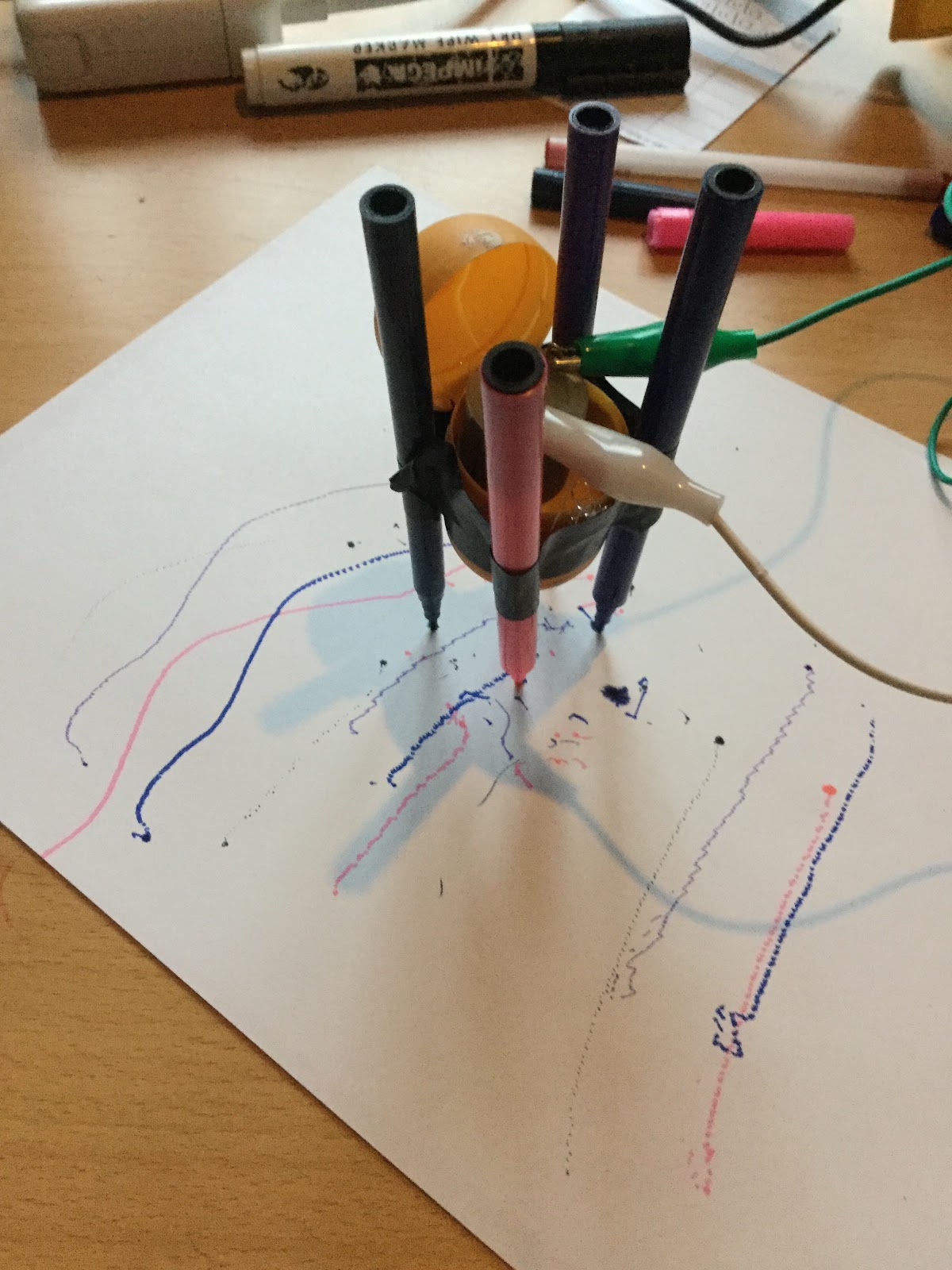
- they, in pairs, initially replicate some code and work out how it worked;
- they then took the code and experimented with their own ideas.
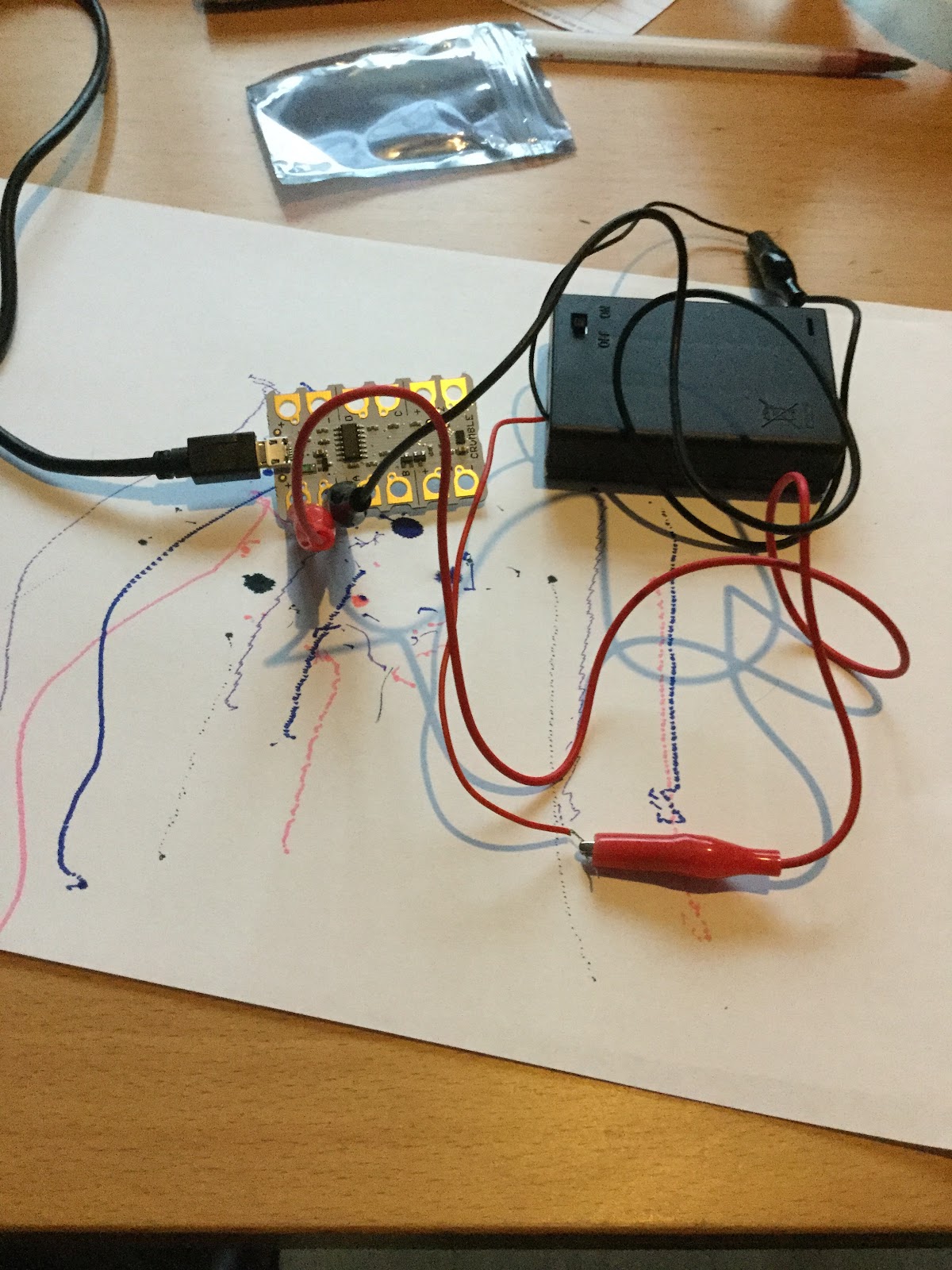
In all cases they had to produce something that allowed doing something on one micro:bit, caused another micro:bit to do something in response.

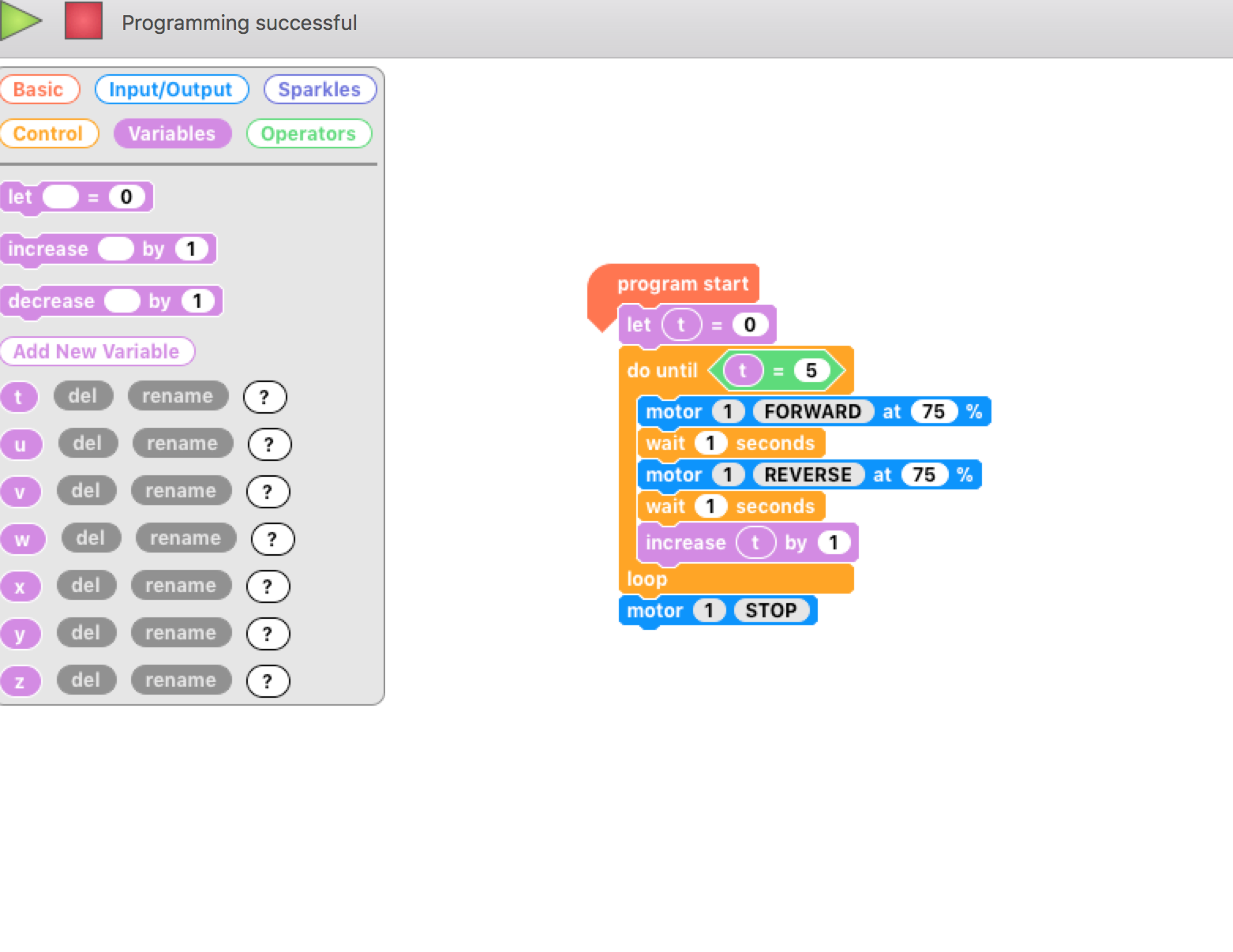
Initially, javascript blocks (as above) were used and some students stuck with the graphical blocks, others moved into the text-based version. As far as the activity went it didn't matter; the main goals were to see the programming of a physical device via a web interface; to break a little mystique that it is as ways much harder to program physical devices and to get a bit of very simple networking going on.
Many of the students, started to investigate getting sounds to play on headphones and getting one micro:bit to trigger the other to play. One group went and started playing with python.
Reflection bit - If I had similar, competent group again I would start this earlier; the level of engagement seemed high and the activities could then start developing towards IoT. Though, I admit to a bias for physical computing, it is appropriate in HE teaching; even using tools primarily designed for schools like the micro:bit.
Related Links
MSc Computing
MSc Computing (Computer Network Engineering)
MSc Computing (Software Engineering)
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with. Twitter @scottturneruon
























{kind=link}
{kind=link}
{kind=link}