/

The ever-brilliant 4tronix have produced Eggbit https://shop.4tronix.co.uk/collections/microbit-accessories/products/eggbit; a cute, wearable device, with ultrasonic sensors, buttons and LEDs for the microbit - I couldn't resist.
Programming is through Makecode and an extension is available, to download and install. To use the extension, at the time of writing this, go through the add extension option and use the search box to add it from https://github.com/4tronix/EggBit

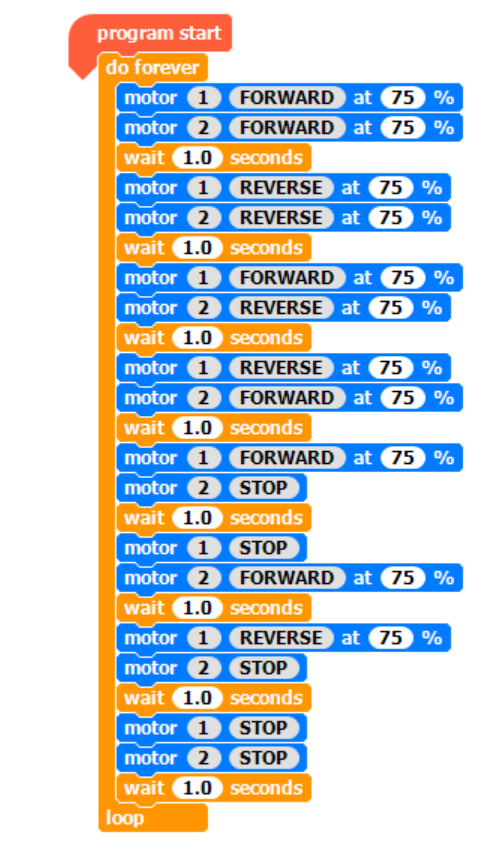
So what to do with it? Inspired by social distancing (or not being a 'hugger') created it so that when people get too close the RGB LEDs go out - simple but fun. The distance is set at 20cm for testing. The code is shown below.

It was fun to do and perhaps swapping the settings around so the lights come on when people at too close might be more fun or using sound. This is a lovely device to play with and the look encourages play - just look how cute it is! The price is reasonable and the look means it has the potential to encourage a wide range of people to experiment with it.






















{kind=link}
{kind=link}
{kind=link}
{kind=link}