Popular Posts
 With the sad news that Anki is shutting down ( https://www.vox.com/2019/4/29/18522966/anki-robot-cozmo-staff-layoffs-robotics-toys-boris-sof...
With the sad news that Anki is shutting down ( https://www.vox.com/2019/4/29/18522966/anki-robot-cozmo-staff-layoffs-robotics-toys-boris-sof...- Popular Posts Lego Robot and Neural Networks An overview of using Lego RCX robots for teaching neural networks present at worksho...
 For a few weeks I have had this kit - Smartibot - waiting to play with - finally got around to it. A cardboard-based, app-controlled, AI...
For a few weeks I have had this kit - Smartibot - waiting to play with - finally got around to it. A cardboard-based, app-controlled, AI...

- An overview of using Lego RCX robots for teaching neural networks present at workshop in 2011. Derby presentation from Scott Turne...

 I was asked recently if the USB robot arm could be programmed - I knew the answer was yes. The Arm came from the CBiS Education Robot Arm ...
I was asked recently if the USB robot arm could be programmed - I knew the answer was yes. The Arm came from the CBiS Education Robot Arm ...
 Guest Blogger Hiren Mistry, Nuffield Research Placement Student working at the University of Northampton. How to use a PS3 Controller to...
Guest Blogger Hiren Mistry, Nuffield Research Placement Student working at the University of Northampton. How to use a PS3 Controller to...
 You can control servos (small ones) from a Micro:Bit directly. Following a link from the David Whale (Twitter @ whaleygeek ) , thank you, t...
You can control servos (small ones) from a Micro:Bit directly. Following a link from the David Whale (Twitter @ whaleygeek ) , thank you, t...
 In a previous post I looked at controlling the Kitronik :Move buggy using Javascript based blocks . In this short post I will show contro...
In a previous post I looked at controlling the Kitronik :Move buggy using Javascript based blocks . In this short post I will show contro...
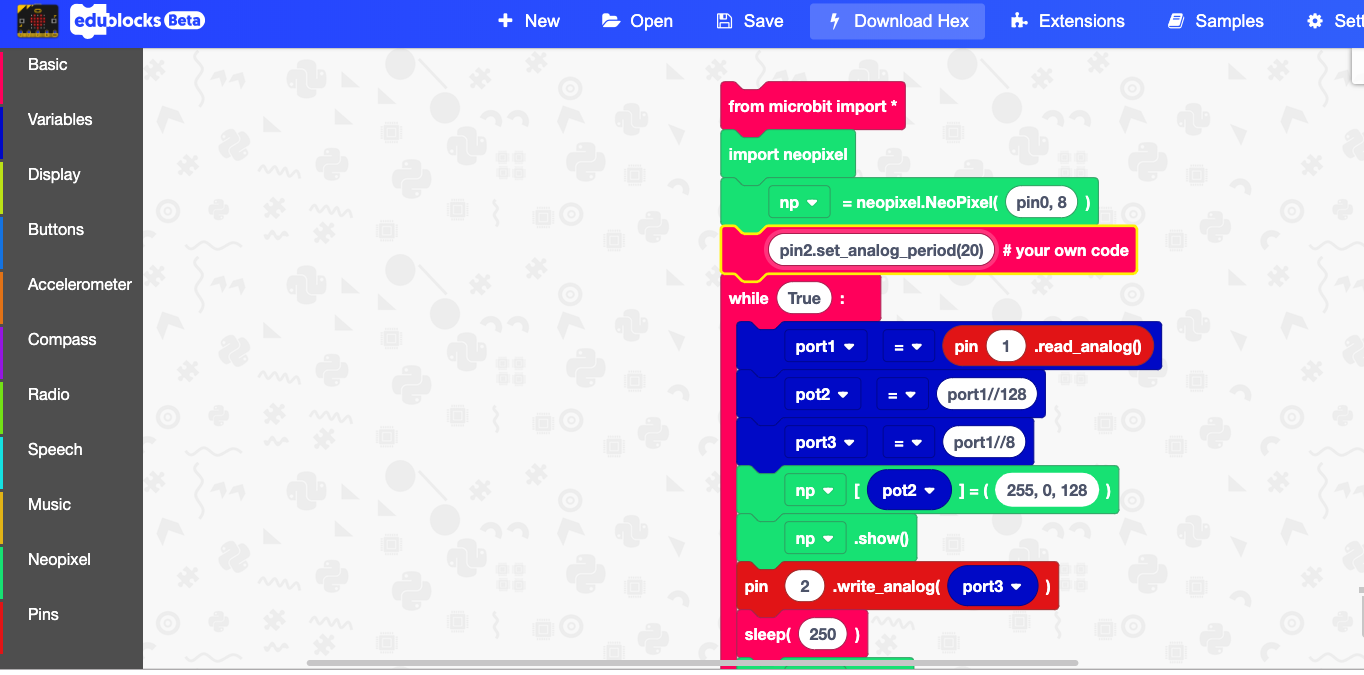
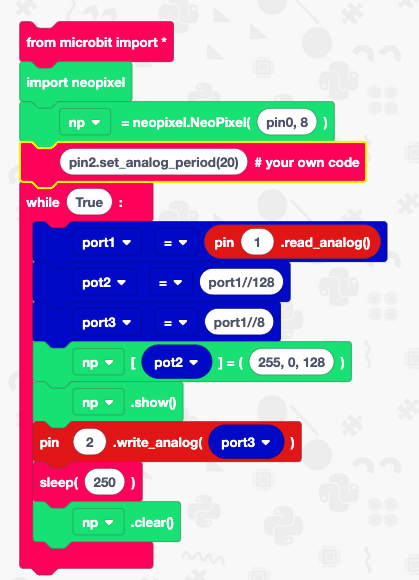
 figure 1 This post builds on two earlier posts and tries to address some of the very useful comments from people who have tried this. I ...
figure 1 This post builds on two earlier posts and tries to address some of the very useful comments from people who have tried this. I ...
- In two previous posts I looked at control the :Move buggy using JavaScript Blocks or Python . In this post we are going to look at contro...
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with. Twitter @scottturneruon