Social robotics has a research area in Universities for a while, looking into interface with robots that are based around our social cues, or modelling social cues to understand neurodiversity such as Autism. Some great work by companies such Aldebaran Robotics (https://www.aldebaran.com/en) with their Nao and Pepper robots have raised the profile of social robotics.
People like Cynthia Breazeal leading on this:
What I find most exciting is these robots are now they are coming into the home.
OhBot
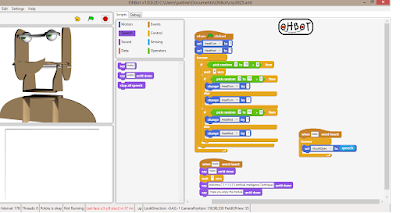
At the entry level in terms of price, and very well featured, is the OhBot (http://ohbot.weebly.com/). This is a is a kit for a robot head with a Scratch-like interface having face-detection, some speech recognition in the current version; controlling several servos to get facial movement. It has provided hours of fun so far (see the video below). This is a great bit of kit for its price.
Jibo
Jibo has been developed by a company headed by Cynthia Breazeal. It is not yet released (end of 2015/beginning of 2016) but the videos make it look very interesting. A stationary robot that seems to be about providing a social interface to many of things we do.
Buddy
A robot soon to be released by Bullfrog Robotics (http://www.bluefrogrobotics.com/buddy-your-companion-robot/) . This is an incredible cute robot.
Related links
It is a good time: 1 Introduction
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.
Sunday 25 October 2015
Saturday 24 October 2015
It is good time 1: Introduction
I have want to write this for a while, a short series of blog posts on why I think this is in an incredible time to be interest in robots and physical computing.
Three posts in the series:
- Introduction
- Small robots
- Social robots
It only takes a quick look on line to see a vibrant and growing network of people who are sharing and supporting each other to use physical computing to do imaginative things. They might go under different names PiJams, Makerspaces, etc but essentially it is about bring people with similar interests (and those are wide) in physical computing together. That is just, physically, but now adding a on-line community that also shares and supports each other you have something that is worth being involved in. If you are unsure what I mean by this have a look at some of the following people's twitter timelines:
@whaleygeek (https://twitter.com/whaleygeek)
@ martinohanlon (https://twitter.com/martinohanlon)
@simonmonk2 (https://twitter.com/simonmonk2)
+Carrie Anne Philbin @MissPhilbin (https://twitter.com/MissPhilbin)
@Makerspaces_com
@TheMagP1
From a very long potential list
Powering all this (apart from drive, enthusiasm, creativity, inventiveness, ....of the people involved) is a number of small devices. Two examples include:
Ok, so what? Why does this matter? My opinion this area is fun to start with, but if you look at the creativity that is going on; new products (that are a mixture of genuinely new ideas, radical refinements or lower costs takes) are being created rapidly. This is exciting.
The next two posts will be about small and social robots emerging at the moment.
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.
Three posts in the series:
- Introduction
- Small robots
- Social robots
It only takes a quick look on line to see a vibrant and growing network of people who are sharing and supporting each other to use physical computing to do imaginative things. They might go under different names PiJams, Makerspaces, etc but essentially it is about bring people with similar interests (and those are wide) in physical computing together. That is just, physically, but now adding a on-line community that also shares and supports each other you have something that is worth being involved in. If you are unsure what I mean by this have a look at some of the following people's twitter timelines:
@whaleygeek (https://twitter.com/whaleygeek)
@ martinohanlon (https://twitter.com/martinohanlon)
@simonmonk2 (https://twitter.com/simonmonk2)
+Carrie Anne Philbin @MissPhilbin (https://twitter.com/MissPhilbin)
@Makerspaces_com
@TheMagP1
From a very long potential list
Powering all this (apart from drive, enthusiasm, creativity, inventiveness, ....of the people involved) is a number of small devices. Two examples include:
- Arduino (see more on these at https://www.arduino.cc/) which are a range of open-source hardware and software components designed for wide use as the basis of physical digital projects (robots anyone?). These are generally low-cost boards and if you go to Kickstarter (https://www.kickstarter.com/) it doesn't take long to find projects and projects that have +Arduino at their core.
- Raspberry Pi (https://www.raspberrypi.org/) is one of the other drivers of this. Essentially a low-cost single board computer developed (and well supported) with the intention of being used to teach basic Computing and potential used in the developing countries. I think it took most people with an interest in physical computing probably less than a second start imagining potential things that can be done with it - and so they went on to prove.
Ok, so what? Why does this matter? My opinion this area is fun to start with, but if you look at the creativity that is going on; new products (that are a mixture of genuinely new ideas, radical refinements or lower costs takes) are being created rapidly. This is exciting.
The next two posts will be about small and social robots emerging at the moment.
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.
Thursday 10 September 2015
Sphero Droid BB-8 on patrol
Sorry not programming this time, but this is a great little toy. An App-control robot from Sphero based on the Star Wars new Sphero BB-8 Droid
One of the other parts of the app include an augmented reality option where on the tablet it appears to be projecting messages and videos (included ones you create).
It is difficult to resist playing with this one.
Thursday 27 August 2015
OhBot and Detecting Faces
With a bit of time off, I had a chance to play with the Ohbot (see Previous related links below) a little more. My son and I played with trying to find could we get it to say hello if there is a face on camera but otherwise make it move randomly as if it was looking.
We based the code on the examples codes that can be found at the OhBot website (http://ohbot.weebly.com/).

The video below shows it in action.
Previous related posts
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.
We based the code on the examples codes that can be found at the OhBot website (http://ohbot.weebly.com/).

The video below shows it in action.
Previous related posts
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.
Sunday 23 August 2015
When is a bug not buggy - CodeBug
When it is a Codebug - a board with 5x5 LED matrix and 4 connectors that can be either inputs or outputs.
- a board with 5x5 LED matrix and 4 connectors that can be either inputs or outputs.

Programming is through a Blockly interface (as above). Code can be tested using the simulator on the left, before downloading to the CodeBug. The site contains a excellent video showing all the steps (see http://www.codebug.co.uk/gettingstarted/ ).

Codebug, Experimenter Kit CODEBUG-EXPKIT
at the moment is usually programmed on-line. There is though a Scratch version in development by Cymplecy (SimpleSi) http://simplesi.net/scratchcodebug-beta-testing/ that is an potential option for off-line programming. It is currently at the Beta testing stage but is good fun to play with.
What is nice about Codebug
and, in fact, most of the Physical Computing device coming out that the moment is the developing community. There is a lot of sharing of projects, ideas and solutions to problems being provide to others through the site (and via Twitter)
I like the Codebug
it is a small, relatively inexpensive device (or will be when it comes on the market- most of the ones out there at the moment are in the hands of those who contributed to the Kickstarter funding). The site (http://www.codebug.co.uk/) is full of useful links, examples and ideas.
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.

Programming is through a Blockly interface (as above). Code can be tested using the simulator on the left, before downloading to the CodeBug. The site contains a excellent video showing all the steps (see http://www.codebug.co.uk/gettingstarted/ ).

Codebug, Experimenter Kit CODEBUG-EXPKIT
What is nice about Codebug
I like the Codebug
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.
Thursday 20 August 2015
Problems First, Second and Third DOI: 10.4018/ijqaete.2014070104

Problems First, Second and Third.
Gary Hill and Scott Turner
DOI: 10.4018/ijqaete.2014070104
DOI: 10.4018/ijqaete.2014070104
Abstract
This paper considers the need to focus initial programming education on problem-solving, prior to the teaching of programming syntax and software design methodology. The main vehicle for this approach is simple Lego based robots programmed in Java, followed by the programming of a graphical representation/simulation to develop programming skills. Problem solving is not trivial (Beaumont & Fox, 2003) and is an important skill, central to computing and engineering. The paper extends the authors earlier research on problems first and problem solving (Hill & Turner, 2011) to further emphasise the importance of problem-solving, problem based learning and the benefits of both physical and visual solutions. An approach will be considered, illustrated with a series of problem-solving tasks that increase in complexity at each stage and give the students practice in attempting problem-solving approaches, as well as assisting them to learn from their mistakes. Some of the problems include ambiguities or are purposely ill-defined, to enable the student to resolve these as part of the process. The benefits to students will be discussed including students' statements that this approach, using robots, provides a method to visually and physically see the outcome of a problem. In addition, students report that the method improves their satisfaction with the course. The importance of linking the problem-solving robot activity and the programming assignment, whilst maintaining the visual nature of the problem, will be discussed, together with the comparison of this work with similar work reported by other authors relating to teaching programming using robots (Williams, 2003). In addition, limitations will be discussed relating to the access to the physical robots and the alternative attempts to simulate the robots using three options of, Microsoft Robotics Studio (MSRS), Lego Mindstorms and Greenfoot simulators.
- Hill, G. and Turner, S. J. (2014) Problems First, Second and Third. International Journal of Quality Assurance in Engineering and Technology Education (IJQAETE). 3(3), pp. 88-109. ISSN: 2155-496 DOI: 10.4018/ijqaete.2014070104
To read a preview of the paper go to: http://www.igi-global.com/viewtitlesample.aspx?id=117560&ptid=91662&t=Problems%20First,%20Second%20and%20Third
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.
Monday 17 August 2015
International partnership pays off for robotics expert Safaa Shwail - defends his PhD thesis
International partnership pays off for robotics expert Safaa Shwail, as he defends his PhD thesis: "Postgraduate student Safaa H Shwail, who studied at both the University of Babylon and University of Northampton, has recently defended his PhD thesis. His work investigated robot pathfinding - how to make robots move at the same time, going to different places, without crashing into each other"
To read more go to: http://www.northampton.ac.uk/news/international-partnership-pays-off-for-robotics-expert-safaa-shwail-as-he-defends-his-phd-thesis
'via Blog this'
If you'd like to find out more about Computing at the University of Northampton go to: www.computing.northampton.ac.uk. All views and opinions are the author's and do not necessarily reflected those of any organisation they are associated with
To read more go to: http://www.northampton.ac.uk/news/international-partnership-pays-off-for-robotics-expert-safaa-shwail-as-he-defends-his-phd-thesis
'via Blog this'
If you'd like to find out more about Computing at the University of Northampton go to: www.computing.northampton.ac.uk. All views and opinions are the author's and do not necessarily reflected those of any organisation they are associated with
Thursday 13 August 2015
OhBot Experiment
As a bit of fun and an excuse to play with the OhBot - I was wondering whether I could get it to produce an introduction to a module when hello is said by the user.
 Features
Features
The video below shows the results.
Related links
Ohbot- social robot
OhBot (http://ohbot.weebly.com/)
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.

- To move randomly with small movements.
- When the word hello is spoken it starts speaking (or appear to).
- Go to a standard starting point initially.
The video below shows the results.
Related links
Ohbot- social robot
OhBot (http://ohbot.weebly.com/)
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.
Monday 10 August 2015
Ohbot a social robot
 I have just finished building an OhBot (http://ohbot.weebly.com/); a robot face (see picture to the left - I fixed the cross-eyes later). This cool little kit actually comes with some very nice software, that includes face tracking and a Scratch-like blocks programming language.
I have just finished building an OhBot (http://ohbot.weebly.com/); a robot face (see picture to the left - I fixed the cross-eyes later). This cool little kit actually comes with some very nice software, that includes face tracking and a Scratch-like blocks programming language.One bit of advice is put as aside several hours to do this, my experience is takes quite a while to build (that might just be me though). It is worth it, when you see the head, eyes, etc moving it is very engaging.

This is nice engaging robot that comes with a user-friendly programming language. The finished robot reminds me a bit of Cynthia Braziel's Kismet robot (http://www.ai.mit.edu/projects/humanoid-robotics-group/kismet/kismet.html) from MIT in the 1990s. So this might also be a good introduction to the area of social robotics and, as at the time of writing this, only £99, a relative inexpensive way into this area.

All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.
Tuesday 4 August 2015
Playing with Tickle and Mini-drone

This was the first time I have actual programmed something that flies and it is quite addictive having something you are controlling being able to move in all directions.
On the left is an example code used, essentially lift off, repeatedly move forward, turn and in the end land.
I wish the mini-drone had a little bit more battery time (I would suggest getting an extra battery). Combining with the drone and the Tickle App does add something to the experience, rather than just control it directly (though that is fun).
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.
Friday 31 July 2015
Lego Mindstorms – Sentry Robots
Sameer Kumar Shrestha, Northampton

The report presents the dissertation on title Prototype of Sentry Robots for Advanced Security which includes the use of LEGO robots showing interaction between each other with the help of wireless communication medium in Bluetooth. The purpose of the work is to build a communication between multiple LEGO robots using the wireless technology. For this task, the NXT version of LEGO Mindstorms has been selected. It is because there is need of complex communication which is possible through wireless medium such as Bluetooth and also a suitable processing device for the proposed task which is present in the LEGO Mindstorms NXT. The report has also focused on the background information about the NXT system and its great flexibility with LeJOS NXJ as the programming platform. The outcome is the implementation of developed work with the use LEGO Mindstorms NXT and the LeJOS NXJ as programming platform. The task was approached with one LEGO NXT robot maintaining the distance between the object in the environment and searching the object by rotating in case of lost. After the completion of the first task, the next task was to study the communication behavior of multiple robots communicating with each other to fulfill the same job. For this, three NXT robots were taken and programmed in such a way that they form the shape of triangle and keep tracking the object. All three of them send and wait for the information from each other and process this information to produce a suitable output, i.e. to respond to the action from each other. Thus, it was found that the implementation of several processes to multiple LEGO based communication had faults, due to the technical hitches with the communication technology and limitations of the NXT systems.
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.
Tuesday 28 July 2015
Picobot - a swarm bot

One of the most interesting small robots on the market is the PicoBot from 4Tronix (http://4tronix.co.uk/blog/?p=708).
These are small, relatively low-cost robots with a good range of basic sensors based around Arduino. A nice feature is they are quick to put together (5-10 minutes each for the two above). The size, time to build and the radio modules make them an interesting option for playing with swarm robotics - if only I had the money.
Don't let the swarm robot idea put you off, as small robots to playing with programming they are good in their own right. Being small with the ultrasonic sensors gives them an non-threatening look; add in they have some build it programs to play with (select by buttons on the bot) to get you going without any programming.
Related Links
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.
Sunday 26 July 2015
Narinder's Swarm Robots

Some interesting work has been developed by Narinder Singh (MSc Computing student and Technician) in the Department of Computing and Immersive Technology, University of Northampton. The work revolves around investigating the use of relatively simple robots, kilobots, to investigate swarm robotics.
The kilobots (http://www.k-team.com/mobile-robotics-products/kilobot) are relatively low-cost devices specifically designed for work of swarm/collective intelligence experiments.
Example:Dancing Kilobots
For more examples go to: Kilobot videoss
Supervisor Scott Turner
opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.
Thursday 23 July 2015
Scratch Robot Arm
 It is not physical but CBiS Education have release a free robot arm simulator for Scratch.
It is not physical but CBiS Education have release a free robot arm simulator for Scratch. Downloadable from their site http://www.cbinfosystems.com/cardboard2code_module2.aspx - it includes a Scratch project, guidance on Scratch along with an exercises in using the robot arm simulation and an exercise with teacher's guidance.
Left my son with it, asked him if he could make it do something if a new sprite is added and the gripper touched it (similar to the exercise in the notes). He went on to produce a sprite that when it is touched by the gripper, went on to change colour a few times. I could see this being potentially used in Coding Clubs within schools.

CBiS produce a physical version of this, details are available at http://www.cbinfosystems.com/cardboard2code_module3.aspx
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.
Wednesday 22 July 2015
mbots - graphical programming and Arduino

My impression so far it is really quite intuitive to work with, in the example above the robot:
- moves forward;
- displays 'f' on the LED matrix;
- turns right;
- displays 'r' on the LED matrix;
- repeats until the on-board is pressed to stop the motors.
What I like most though is seeing the graphical code turned into Arduino code - the potential to see the same thing done into two ways adds extra educational value.
Related
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.
Monday 20 July 2015
Lego Robot and Neural Networks
An overview of using Lego RCX robots for teaching neural networks present at workshop in 2011.
The video below shows the robot trying out sets of weights for two neurones, until a set of weights are found that enable the robot to go around the circle.
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.
The video below shows the robot trying out sets of weights for two neurones, until a set of weights are found that enable the robot to go around the circle.
As a part of a set of tools I have found the following useful for teaching the principles of simple neurones.
Example code:
import josx.platform.rcx.*;
public class annlf{
public static void main(String[] args)
{
int w[][] ={//put weights here};
int o[]={1,1};
int s1,s2,res1,res2;
int sensor1=0,sensor2=0;
robot_1 tom=new robot_1();
Sensor.S1.activate();
Sensor.S3.activate();
for(;;){
sensor1=Sensor.S1.readValue();
sensor2=Sensor.S3.readValue();
LCD.showNumber(sensor1);
if (sensor1<42)
s1=1;
else
s1=0;
if (sensor2<42)
s2=1;
else
s2=0;
res1=w[0][1]*s1+w[0][2]*s2+w[0][0];
if (res1>=0)
o[0]=1;
else
o[0]=0;
res2=w[1][1]*s1+w[1][2]*s2+w[1][0];
if (res2>=0)
o[1]=1;
else
o[1]=0;
if ((o[0]==1)&&(o[1]==1))
tom.forward1(10);
if ((o[0]==0)&&(o[1]==0))
tom.backward1(20);
if ((o[0]==1)&&(o[1]==0))
tom.tlturn(20);
if ((o[0]==0)&&(o[1]==1))
tom.trturn(20);
LCD.refresh();
}
}
}
The
example code uses two neurones to produce a line follower. The nice thing about
this though is it easy to adapted this for a single neuron or multiple neuron
tasks. For more on this some examples can be found here.
The
above approaches used the Mindstorms RCX robots but it can equally be done with
the newer NXT robots.
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.
Sunday 19 July 2015
Raspberry Pi Controlled robot from junk
Previous Posts:
(http://junkbots.blogspot.com/2014/08/junkbot-pi-1-scratchgpio.html) and showed a Pi controlled junkbot briefly in action (http://junkbots.blogspot.co.uk/2014/08/junkbot-raspberry-pi-2-raspberry-pi.html).
In this post I aim to discuss
- Choice of motor controller card
- Provide an example of a drawing junkbot controlled through Scratch and Raspberrry Pi
Choice of interface/Controller card
The card chosen was the 4Tronix PiRoCon card (http://4tronix.co.uk/store/index.php?rt=product/product&product_id=182). Selected for four reasons
- Price is reasonable (in my opinion).
- Fits straight onto the Pi through the GPIO - no extra cables needed.
- ScratchGPIO has it as an addon so it makes programming it even easier (see http://cymplecy.wordpress.com/2013/10/31/pirocon-from-4tronix/).
- Others are using it for robot projects.
Use it is quite easy plug the board directly on to the GPIO connector of the Raspberry Pi (4tronix provide some advice in section 15 of http://4tronix.co.uk/blog/?p=22 on mounting the board). The only other changes I needed to make because I wasn't powering the motors through the DC input I had to change the jumper settings next to Vin Connector (see http://4tronix.co.uk/blog/?p=41 for layout) to reflect this.
Example
Now for the fun bit get the whole thing to draw (see Figure 1 and the video at the end)!
The junkbot itself is made up of a drinks can, three supports (we used LEGO here but it equally could be straws, sticks), a pen/pencil, and a motor and broken propeller combination to create an unbalanced motor.
With the Raspberry Pi off, the the motor's wires are connected to the controller card at the connections for MotorA and the battery is also connected. Turn the Pi on and run ScratchGPIO5plus.
 |
| Figure 2 |
 |
| Figure 3 |
 |
| Figure 4 |
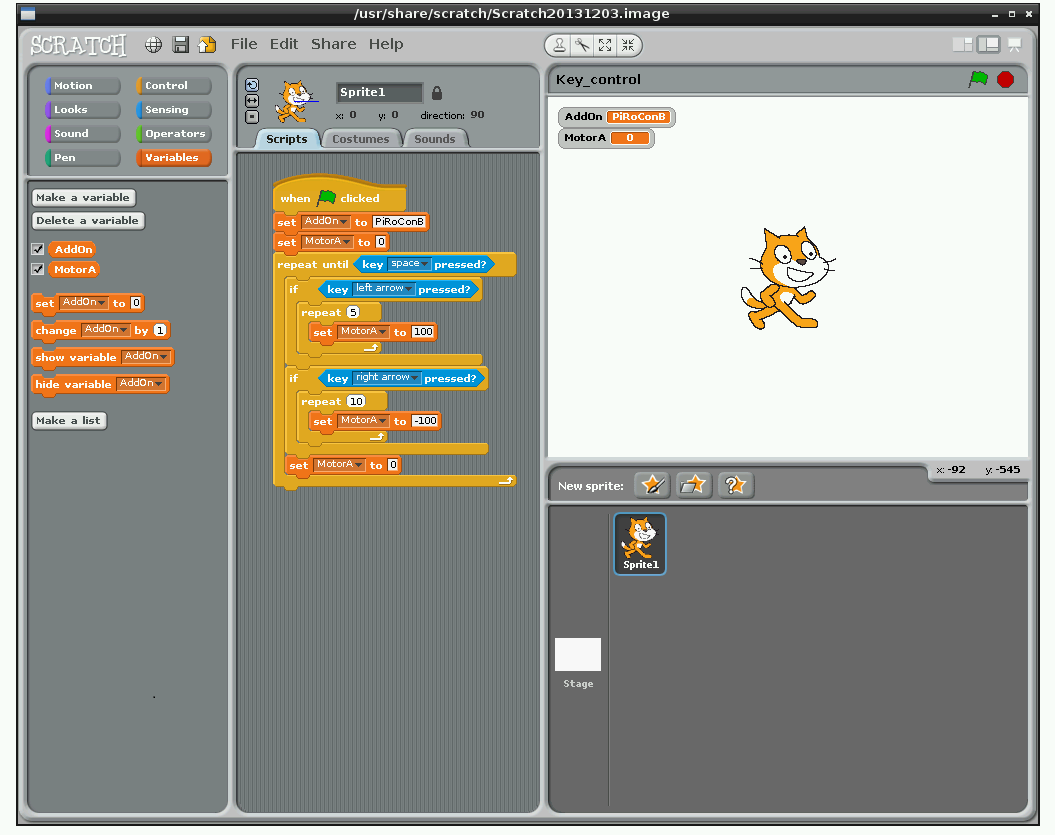
The first task is to make the variables AddOn (which will be used to tell the program we are using the PiRoCon card) and MotorA for the motor (see Figure 3).
In Figure 4 the program can be seen, essentially the left and right key spin the junkbot clockwise or anticlockwise by setting the Motor to either +ve or -ve values from 0 to 100. The space bar is used to stop the motor.
As it moves because one of the supports is a pen it draws. See the video below to watch it draw a squiggly line - control is still a challenge.
The bot was developed by Hayden Tetley and Scott Turner. Hayden's time was paid for through the Nuffield Research Placements Scheme (http://www.nuffieldfoundation.org/nuffield-research-placements).
Related Link
Junkbot Raspberry Pi: 1 ScratchGPIO
Junkbot Raspberry Pi: 2 Raspberry Pi Junkbot in action
If you would like to know more about the Junkbots project contact scott.turner@northampton.ac.uk. The views and opinions is the authors and should not be taken as representing the views of any organisation the author is associated with.
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.
Edge following CrumbleBot
Recently I have been playing with the CrumbleBot (http://4tronix.co.uk/store/index.php?rt=product/product&product_id=493) based around the Crumble Controller (http://redfernelectronics.co.uk/crumble/) providing a intuitive graphical interface (similar to Scratch) to control two motors and four inputs/outputs. The CrumbleBot comes with line-detecting sensors and Light-Dependent Resistors for light detection, with a few other features that I have yet to play with. So is nice little framework for simple robotics. Make sure you order the Crumble Controller at the same time as CrumbleBot.
Building the 'Bot' is relatively simple and 4Tronix have provided some easy to follow instructions on-line (http://4tronix.co.uk/crumble/CrumbleBot.pdf) that are almost foolproof (I manage to build it!).
So I wanted to experiment with making a edge following robot - where the robot goes around a line by following the edge of the line. The idea is while make small movements,
Accidentally, I end up playing with two ways to detect the line. Started with connecting, using crocodile clips, the two sensors to the Crumble and treating them as analogue signals and if there was a big difference between the one I want to stay on the line and the one off the line then the line's edge is detected. The assumption is the sensor on the black line reflects less light, so a lower value produced and that is what is detected. It work see the video below that used this approach - but the assumption was wrong.
4Tronix contacted me saying the line sensors are digital (thank you for that), so used them as a digital inputs and it did simplify the code a lot and still worked.
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.
Building the 'Bot' is relatively simple and 4Tronix have provided some easy to follow instructions on-line (http://4tronix.co.uk/crumble/CrumbleBot.pdf) that are almost foolproof (I manage to build it!).
So I wanted to experiment with making a edge following robot - where the robot goes around a line by following the edge of the line. The idea is while make small movements,
- Check that one of the sensors is on the line (in my case the right sensor);
- If that sensor detects the line, then pull the robot to the left slightly and then forward a small step;
- If the sensor does not detect the line, the pull the robot to the right slightly.
Accidentally, I end up playing with two ways to detect the line. Started with connecting, using crocodile clips, the two sensors to the Crumble and treating them as analogue signals and if there was a big difference between the one I want to stay on the line and the one off the line then the line's edge is detected. The assumption is the sensor on the black line reflects less light, so a lower value produced and that is what is detected. It work see the video below that used this approach - but the assumption was wrong.
4Tronix contacted me saying the line sensors are digital (thank you for that), so used them as a digital inputs and it did simplify the code a lot and still worked.
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.
Thursday 16 July 2015
cutest computational thinking in the world?


Blockly, available as one of apps, can be used to program the robots. It is a simple looking graphical language (simpler looking but similar to Scratch). A simple example (shown opposite) where Dash (the bigger of the two) does things such as moves forward, going left, lights change to orange, , left ear changes colour, head moves forward and it roars like a dinosaur. It relatively easy to then add loops and test (such as checking if it's 'friend' Dot is in view). Below is a very short video of Dash moving around until it 'sees' Dot.
It is difficult not to anthropomorphise these, especially when they are left alone they try and attract your attention with noises. They are just fun as well.
Recently, other developers have been producing alternative programming approaches. The Tickle App (https://tickleapp.com/en-us/) has added these robots to their supported devices.

All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.
Wednesday 15 July 2015
Robots and Problem-solving or is it Computational Thinking


Lawhead et al (2003) stated that robots “…provide entry level programming students with a physical model to visually demonstrate concepts” and “the most important benefit of using robots in teaching introductory courses is the focus provided on learning language independent, persistent truths about programming and programming techniques. Robots readily illustrate the idea of computation as interaction”. Synergies can be made with our work and those one on pre-object programming and simulation of robots for teaching programming as a visual approach to the teaching of the widely used programming language Java.
The main benefits that the students stated of this approach was they believe robots provide a method to visually and physically see the outcome of a problem. The approach taken the module has been visually-orientated. The appropriateness of this seems to be borne out by the student comments. Student satisfaction for a module based around this approach is over 92%. One of the comments made was that the linking of the problem-solving robot task and the programming assignment was liked. This feedback is similar to that reported by other authors when teaching programming using robots (Williams et al, 2003). There is enough scope in this approach to have different levels of complexity/functionality within an assignment task offering a basic ‘pass’ level for a particular task, but also the scope for those students that desire more of a challenge.
Reference
Lawhead PB, Bland CG, Barnes DJ, Duncan ME, Goldweber M, Hollingsworth RG,
Schep M (2003), A Road Map for Teaching Introductory Programming Using
LEGO Mindstorms Robots SIGCSE Bulletin, 35(2): 191-201.
Williams AB (2003) The Qualitative Impact of Using LEGO MINDSTORMS Robot
to Teach Computer Engineering IEEE Trans. Educ. Vol. 46 pp 206.
Publications
- Hill, G. and Turner, S. J. (2014) Problems First, Second and Third. International Journal of Quality Assurance in Engineering and Technology Education (IJQAETE). 3(3), pp. 88-109. ISSN: 2155-496 DOI: 10.4018/ijqaete.2014070104
- Turner S (2014) "Greenfoot in Problem solving and Artificial Intelligence" CEISEE 2014 University of Electronic Science and Technology of China, Chengdu China 24-25 April 2014. 2013
- Turner S (2011) Neural Nets Robotics Workshop. Bot Shop! University of Derby, 28th October 2011.
- Hill G, Turner S (2011) Chapter 7 Problems First Software Industry-Oriented Education Practices and Curriculum Development: Experiences and Lessons edited by Drs. Matthew Hussey, Xiaofei Xu and Bing Wu. ISBN: 978-1609607975 IGI Global June 2011 DOI: 10.4018/978-1-60960-797-5.ch007
- Turner S and Hill G (2010) "Innovative use of Robots and Graphical Programming in Software Education" Computer Education Ser. 117 No. 9 pp 54-57 ISSN: 1672-5913
- Turner S, Hill G, Adams J (2009) "Robots in problem solving in programming" 9th 1-day Teaching of Programming Workshop, University of Bath, 6th April 2009.
- Turner S and Hill G(2008) "Robots within the Teaching of Problem-Solving" ITALICS vol. 7 No. 1 June 2008 pp 108-119 ISSN 1473-7507
- Turner S and Adams J (2008) "Robots and Problem Solving" 9th Higher Education Academy-ICS Annual Conference, Liverpool Hope University, 26th August - 28th August 2008. pp. 14 ISBN 978-0-9559676-0-3.
- Adams, J. and Turner, S., (2008) Problem Solving and Creativity for Undergraduate Computing and Engineering students: the use of robots as a development tool Creating Contemporary Student Learning Environments 2008, Northampton, UK.
- Adams, J. and Turner, S., (2008) Problem Solving and Creativity for Undergraduate Engineers: process or product? International Conference on Innovation, Good Practice and Research in Engineering Education 2008, Loughborough, UK.
- Adams, J., Turner, S., Kaczmarczyk, S., Picton, P. and Demian, P.,(2008). Problem Solving and Creativity for Undergraduate Engineers: findings of an action research project involving robots International Conference on Engineering Education ICEE 2008, Budapest, Hungary.
- Turner S and Hill G(2007) Robots in Problem-Solving and Programming 8th Annual Conference of the Subject Centre for Information and Computer Sciences, University of Southampton, 28th - 30th August 2007, pp 82-85 ISBN 0-978-0-9552005-7-1
- Turner S (2007) Developing problem-solving teaching material based upon Microsoft Robotics Studio. 8th Annual Conference of the Subject Centre for Information and Computer Sciences, University of Southampton, 28th - 30th August 2007 pp 151 ISBN 0-978-0-9552005-7-1
- Turner S (2007) Developing problem-solving teaching materials based upon Microsoft Robotics Studio. Innovative Teaching Development Fund Dissemination Day 1st March 2007 Microsoft:London
- Turner S and Hill G (2006) The Inclusion Of Robots Within The Teaching Of Problemsolving: Preliminary Results Proceedings of 7th Annual Conference of the ICS HE Academy Trinity College, Dublin, 29th - 31st August 2006 Proceedings pg 241-242 ISBN 0-9552005-3-9
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.
Subscribe to:
Posts (Atom)
Top posts on this blog in March 2024
The Top 10 viewed post on this blog in March 2024. Covering areas such as small robots, augmented reality, Scratch programming, robots. Micr...
