Saturday, 22 October 2016
Disco micro:pixel
In a previous post Proto-Pic board, Microbit and Micropython I played with the Proto-Pic micro:pixel 4x8 NeoPixel board.
This post is just a short description of a quick play with making it flashing blocks of different colours across the board. The routine produces five random numbers (three to define the colours, one for which pixel is selected and the last for the delay each iteration). The idea of being - a pixel is selected, but so are the ones either side of it, each one has a different combination of the colour values, but only two of the pixels are turned off after the delay.
from microbit import *
import neopixel, random
# Setup the Neopixel strip on pin0 with a length of 2 pixels
np = neopixel.NeoPixel(pin0, 32)
while True:
pxl=random.randint(1,30)
rd=random.randint(1,32)
gr=random.randint(1,32)
bl=random.randint(1,32)
t1=random.randint(10,100)
np[pxl] = (rd, gr, bl)
np[pxl-1] = (gr, bl, rd)
np[pxl+1] = (bl, rd, gr)
np.show()
sleep(t1)
np[pxl] = (0, 0, 0)
np[pxl+1] = (0, 0, 0)
The video below shows the routine in action. There is no connection between the pixels and the music on the video - but making the connection between music and the pixels would be an interesting project.
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with. Twitter @scottturneruon
Thursday, 20 October 2016
micro:pixel board, micro:bit and micropython
A new (or to me at least) addition to devices you can attach a Micro:Bit to, is the Proto-Pic micro:pixel 4x8 NeoPixel board; essentially a board with 4 x8 grid of NeoPixels that you plug the Micro:Bit into. Following the advice of the website the values of RGB are all set to 32 or below to avoid pulling too much power. Pin0 is used to write to. You will need to use the Mu editor for this.

Two tests were tried
Example 1: To get the pixels to appear to light up from the last to the first one.
from microbit import *
import neopixel
np = neopixel.NeoPixel(pin0, 32)
while True:
for x in range(0, 32):
for y in range(0, (32-x)):
np[y] = (y, 32-y, 1)
if (y>0):
np[y-1]=(0,0,0)
np.show()
sleep(30)
Example 2: To randomly select a pixel and its colour.
from microbit import *
import neopixel, random
np = neopixel.NeoPixel(pin0, 32)
while True:
pxl=random.randint(0,31)
rd=random.randint(1,32)
gr=random.randint(1,32)
bl=random.randint(1,32)
np[pxl] = (rd, gr, bl)
np.show()
sleep(500)
np[pxl] = (0, 0, 0)
This is a good, fun board to play with; relatively easy to use.
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with. Twitter @scottturneruon

Two tests were tried
Example 1: To get the pixels to appear to light up from the last to the first one.
from microbit import *
import neopixel
np = neopixel.NeoPixel(pin0, 32)
while True:
for x in range(0, 32):
for y in range(0, (32-x)):
np[y] = (y, 32-y, 1)
if (y>0):
np[y-1]=(0,0,0)
np.show()
sleep(30)
Example 2: To randomly select a pixel and its colour.
from microbit import *
import neopixel, random
np = neopixel.NeoPixel(pin0, 32)
while True:
pxl=random.randint(0,31)
rd=random.randint(1,32)
gr=random.randint(1,32)
bl=random.randint(1,32)
np[pxl] = (rd, gr, bl)
np.show()
sleep(500)
np[pxl] = (0, 0, 0)
This is a good, fun board to play with; relatively easy to use.
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with. Twitter @scottturneruon
Thursday, 6 October 2016
Micro:bit sings - sort of
Just a short post today on getting the Micro:bit to sing using micropython. The process is covered very well in the Micro:bit-Micropython documentation. This post is just my notes really of what I did.
The goal was to the try and replicate a bit of the intro to Kraftwerk's The Man-Machine (the repeating of Machine)- I came nowhere near it but it was fun trying.

Everything needs to be spelt out in Phonemes, which is a bit of a challenge, but I only had one word to do so that was ok. The Micro:bit-Micropython documentation has a list of the Phonemes allowed, you do need to get them right this was the most common error I found with the code. Pins 0 and 1 had croc-clips connecting them to the first and third parts on a speakers 3.5mm plug (as above) - thank you to Sway Grantham for showing me that.
from microbit import *
import speech
while True:
speech.sing("MEYSHEYN ", pitch=90,speed=100)
speech.sing("MEYSHEYN ", pitch=70, speed=80)
speech.sing("MEYSHEYN ", pitch=60,speed=60)
It is good fun, but develop it away from others, it has the potential to annoy.
It also works with 4Tronix's (thank you for the suggestion) Micro:Bit PlayGround - only one connection needed this time.

All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with. Twitter @scottturneruon
The goal was to the try and replicate a bit of the intro to Kraftwerk's The Man-Machine (the repeating of Machine)- I came nowhere near it but it was fun trying.

Everything needs to be spelt out in Phonemes, which is a bit of a challenge, but I only had one word to do so that was ok. The Micro:bit-Micropython documentation has a list of the Phonemes allowed, you do need to get them right this was the most common error I found with the code. Pins 0 and 1 had croc-clips connecting them to the first and third parts on a speakers 3.5mm plug (as above) - thank you to Sway Grantham for showing me that.
from microbit import *
import speech
while True:
speech.sing("MEYSHEYN ", pitch=90,speed=100)
speech.sing("MEYSHEYN ", pitch=70, speed=80)
speech.sing("MEYSHEYN ", pitch=60,speed=60)
It is good fun, but develop it away from others, it has the potential to annoy.
It also works with 4Tronix's (thank you for the suggestion) Micro:Bit PlayGround - only one connection needed this time.

All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with. Twitter @scottturneruon
Monday, 3 October 2016
Playing with 4Tronix's Micro:bit Playground


The Micro:Bit screws into the PlayGround via five screws which also for the connection between the PlayGround and the 'bit'.
Below via the three cables connecting 3.5mm plugs, I have attached a 'Dial' (a potentiometer ) and two Flames (neopixels) to change the LED/neopixel's colours by rotating the Dial. Pin 0 has the 'Dial' attached and Pin 1 has the two Flames (neopixels) attached the out from the first goes in as input of the second via one the cables.

Code
Essentially vary the 'Dial' varies the R,G,B values going to the two Flames/neopixels and so varying their colours. The code used is shown below.
from microbit import *
import neopixel
# Setup the Neopixel strip on pin0 with a length of 2 pixels
np = neopixel.NeoPixel(pin1, 2)
while True:
s1=int(pin0.read_analog()/5)
np[0] = (255, s1, 255-s1)
np[1] = (s1,255, 255-s1)
np.show()
Video of it in action
Thoughts
I like the idea that the cable doing both the power and control for the Gizmos, it does simplify building a little, more importantly it does produce less clutter (not so many wires). The whole unit with the batteries installed is a little weighty but that does give it at the same a sense of sturdiness which is a positive feature for just playing around - you wouldn't use it for wearables. Not using croc clips also avoids issues with the clips slipping off with rough handling.
Nice little arrangement which I am enjoying playing - is for everyone? Probably not, but does provide a sturdy system to experiment with some standardised units.
Related Links
Micro:Bit Playground - Starter Kit
Traffic lights - Microbit, GlowBugs and micropython
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with. Twitter @scottturneruon
Saturday, 1 October 2016
Micro:bit, Servo control with Micropython or blocks
You can control servos (small ones) from a Micro:Bit directly. Following a link from the David Whale (Twitter @whaleygeek) , thank you, took me to a Kitronik blog post, https://www.kitronik.co.uk/blog/using-bbc-microbit-control-servo/, which has the answer.
The code uses Microsoft Blocks taken from the post, runs the servos 180 degrees and back again, when button A is pressed. It does exactly what it should. I am also using the Tower Pro SG90 servo.
 Can it be replicated in Micropython? This is a new mini project, there seems to be little out there yet on how do this but the best so far is this video by PHILG2864:
Can it be replicated in Micropython? This is a new mini project, there seems to be little out there yet on how do this but the best so far is this video by PHILG2864:
The closest I have is the following, it is essentially there.
from microbit import *
pin0.set_analog_period(20)
while True:
pin0.write_analog(180)
sleep(1000)
pin0.write_analog(1)
sleep(1000)
Setting the time period to 20ms pin0.set_analog_period(20)seems by experiment (and used in the video above) to be best value so far. The reason for pin0.write_analog(1) set to 1 instead of 0, 0 seems to stop the whole thing.
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with. Twitter @scottturneruon
The code uses Microsoft Blocks taken from the post, runs the servos 180 degrees and back again, when button A is pressed. It does exactly what it should. I am also using the Tower Pro SG90 servo.

The closest I have is the following, it is essentially there.
from microbit import *
pin0.set_analog_period(20)
while True:
pin0.write_analog(180)
sleep(1000)
pin0.write_analog(1)
sleep(1000)
Setting the time period to 20ms pin0.set_analog_period(20)seems by experiment (and used in the video above) to be best value so far. The reason for pin0.write_analog(1) set to 1 instead of 0, 0 seems to stop the whole thing.
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with. Twitter @scottturneruon
Sunday, 25 September 2016
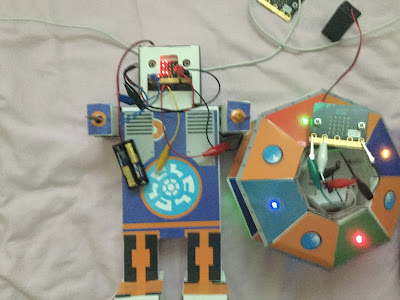
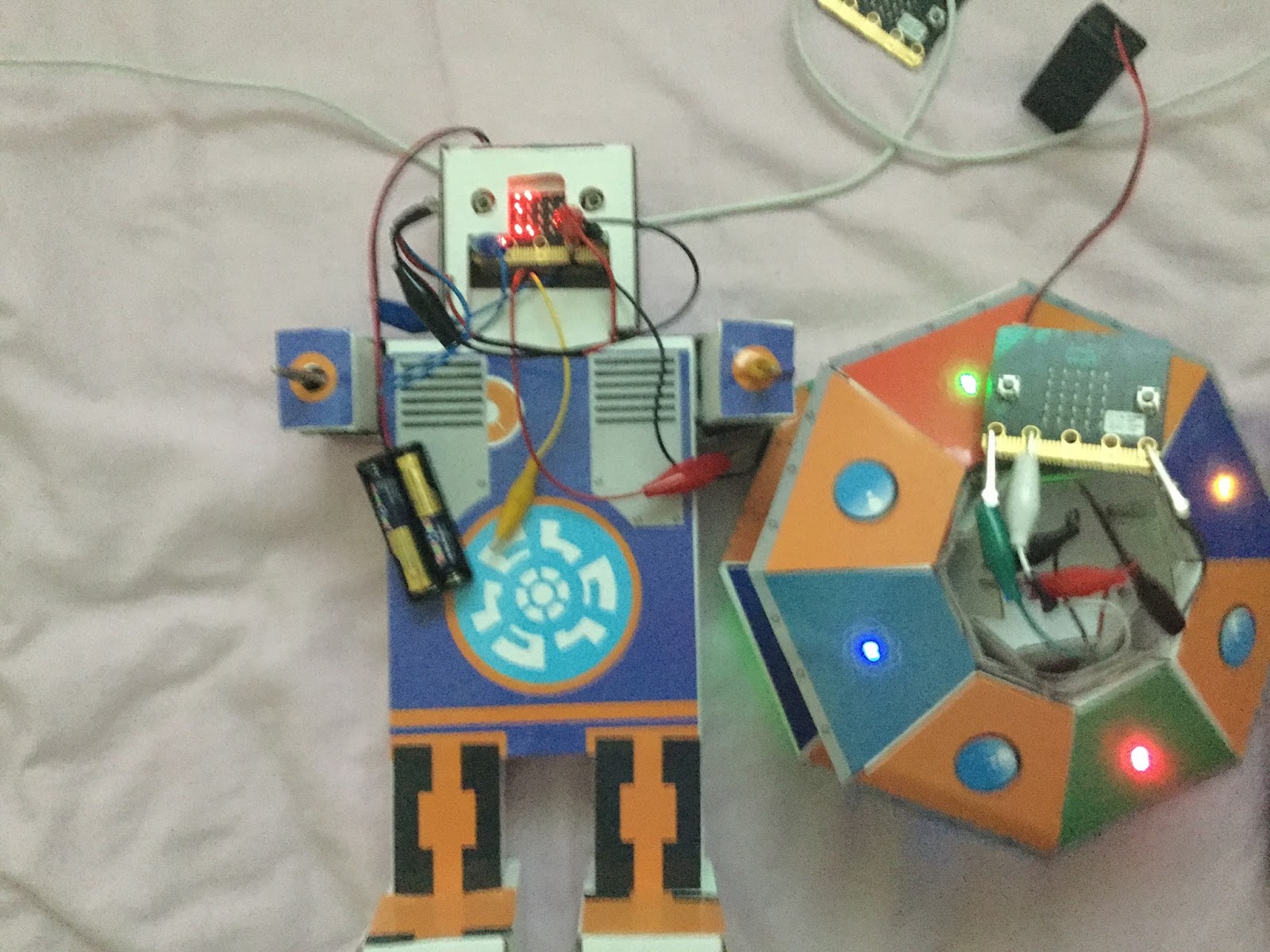
UFO talks to Robot - part two
In part one of this series of posts, the project to get Consumable Robotics UFO and Dimm robot was started but focussed on the UFO kit. The goal being for some action on Dimm to trigger a series of messages being passed between the two of them.
In this post, the focus moves to Dimm and the setting up the actions leading to the messaging.
Stage 1 Build
Using the Micro:bits port 0 (as part of the Dimm robot) for the input from the light sensor, which is included in the kit (Red lead going to 3v and the black lead going to GND). Just to note the less light there is the higher the value on the sensor.
Stage 2 Code
Micropython programmed through the Mu editor (see below)

If light levels are high then :
scroll a message saying "calling UFO"
send the code "dimm" via bluetooth.
otherwise:
scroll a message saying "I can't see"
If it recieves "ufo" via bluetooth :
display "Hello, UFO called me"
Micropython code
import radio
from microbit import pin0, pin1, display, sleep
radio.on()
while True:
incoming = radio.receive()
if incoming == 'ufo':
display.scroll("Hello, UFO called me", 75)
if pin0.read_analog()<175:
display.scroll("calling UFO")
radio.send("dimm")
else:
display.scroll("I can't see")
Stage 3 Testing
Video below shows it in action including what happens when the light (in this case a torch) shines on the sensor connected to Dimm; a message is sent and picked up by the UFO kit (LEDs flash and the message saying "DIMM calling" scrolls across the UFO LED array - see UFO talks to robot - part one for more details). A message is sent back from the UFO kit and on Dimm's LED array the message "Hello, UFO called me").
If the light levels are too low then the message "I can't see" scrolls across Dimm's LED array.
As an aside, the Dimm robot still reminds me, a little, of a colourful, friendly, Ood from Dr Who with all the leads hanging out of the 'mouth' - think that is geeky I know.
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with. Twitter @scottturneruon
In this post, the focus moves to Dimm and the setting up the actions leading to the messaging.
Stage 1 Build
Using the Micro:bits port 0 (as part of the Dimm robot) for the input from the light sensor, which is included in the kit (Red lead going to 3v and the black lead going to GND). Just to note the less light there is the higher the value on the sensor.
Stage 2 Code
Micropython programmed through the Mu editor (see below)

If light levels are high then :
scroll a message saying "calling UFO"
send the code "dimm" via bluetooth.
otherwise:
scroll a message saying "I can't see"
If it recieves "ufo" via bluetooth :
display "Hello, UFO called me"
Micropython code
import radio
from microbit import pin0, pin1, display, sleep
radio.on()
while True:
incoming = radio.receive()
if incoming == 'ufo':
display.scroll("Hello, UFO called me", 75)
if pin0.read_analog()<175:
display.scroll("calling UFO")
radio.send("dimm")
else:
display.scroll("I can't see")
Stage 3 Testing
Video below shows it in action including what happens when the light (in this case a torch) shines on the sensor connected to Dimm; a message is sent and picked up by the UFO kit (LEDs flash and the message saying "DIMM calling" scrolls across the UFO LED array - see UFO talks to robot - part one for more details). A message is sent back from the UFO kit and on Dimm's LED array the message "Hello, UFO called me").
If the light levels are too low then the message "I can't see" scrolls across Dimm's LED array.
As an aside, the Dimm robot still reminds me, a little, of a colourful, friendly, Ood from Dr Who with all the leads hanging out of the 'mouth' - think that is geeky I know.
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with. Twitter @scottturneruon
UFO talks to Robot - part one
In previous posts (UFO has Landed and DIMM the OOD), I started playing with the CBiSEducation's UFO consumable robots. Still using the Micro:Bit, in this two part post series, I am going to be playing with using Micropython to send messages between the two kits.

Stage 1 Wiring and Set up-UFO
Pins 0 and 1 are outputs to the LEDs
The black leads on the UFO go to GND.
Micropython, using the Micro:Bit's built in radio module (Bluetooth), is used to communication between the two kits.
Stage 2 Code -UFO
The code is set to flash the UFO's LEDs and then scroll a message "DIMM Calling" when it receives a message "dimm" via Bluetooth.
Basic overview is
- Turn on the radio module - radio.on()
- If the message is received then turn the LEDs on and off and scrolls "DIMM calling" across the LED array.
- send a message via bluetooth "ufo" to whoever is listening (in the end the robot DIMM hopefully). The code is shown below.
import radio
from microbit import pin0, pin1, display, sleep
def pulseLed1(duration):
pin1.write_digital(0)
pin0.write_digital(1)
sleep(duration)
def pulseLed2(duration):
pin1.write_digital(1)
pin0.write_digital(0)
sleep(duration)
def stopIt():
pin0.write_digital(0)
pin1.write_digital(0)
radio.on()
while True:
incoming = radio.receive()
stopIt()
if incoming == 'dimm':
pulseLed1(1000)
pulseLed2(1000)
stopIt()
radio.send("ufo")
display.scroll("DIMM calling")
To use the radio module you will need to switch to the mu editor (http://codewith.mu/).

Stage 3 Testing it
To test it, a second Micro:bit was used to send test signals (the code for this is shown below). When button A is pressed on the second Micro:Bit a message 'dimm' is sent followed by sending 'not'.
import radio
from microbit import button_a, button_b, sleep
radio.on()
while True:
if button_a.is_pressed():
radio.send('dimm')
radio.send('not')
if button_b.is_pressed():
radio.send('ufo')
radio.send('not')
The UFO does cycle through the sequence LEDs flash and the message scrolls. The slight bug is in repeats it several times before it stops; possibly a buffering issue somewhere.
Stage 4
In the next post (http://bit.ly/2d3zlh0), I will be building the Robot DIMM part of the system - sending and receiving message and detecting light levels in micropython.
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with. Twitter @scottturneruon

Stage 1 Wiring and Set up-UFO
Pins 0 and 1 are outputs to the LEDs
The black leads on the UFO go to GND.
Micropython, using the Micro:Bit's built in radio module (Bluetooth), is used to communication between the two kits.
Stage 2 Code -UFO
The code is set to flash the UFO's LEDs and then scroll a message "DIMM Calling" when it receives a message "dimm" via Bluetooth.
Basic overview is
- Turn on the radio module - radio.on()
- If the message is received then turn the LEDs on and off and scrolls "DIMM calling" across the LED array.
- send a message via bluetooth "ufo" to whoever is listening (in the end the robot DIMM hopefully). The code is shown below.
import radio
from microbit import pin0, pin1, display, sleep
def pulseLed1(duration):
pin1.write_digital(0)
pin0.write_digital(1)
sleep(duration)
def pulseLed2(duration):
pin1.write_digital(1)
pin0.write_digital(0)
sleep(duration)
def stopIt():
pin0.write_digital(0)
pin1.write_digital(0)
radio.on()
while True:
incoming = radio.receive()
stopIt()
if incoming == 'dimm':
pulseLed1(1000)
pulseLed2(1000)
stopIt()
radio.send("ufo")
display.scroll("DIMM calling")
To use the radio module you will need to switch to the mu editor (http://codewith.mu/).

Stage 3 Testing it
To test it, a second Micro:bit was used to send test signals (the code for this is shown below). When button A is pressed on the second Micro:Bit a message 'dimm' is sent followed by sending 'not'.
import radio
from microbit import button_a, button_b, sleep
radio.on()
while True:
if button_a.is_pressed():
radio.send('dimm')
radio.send('not')
if button_b.is_pressed():
radio.send('ufo')
radio.send('not')
The UFO does cycle through the sequence LEDs flash and the message scrolls. The slight bug is in repeats it several times before it stops; possibly a buffering issue somewhere.
Stage 4
In the next post (http://bit.ly/2d3zlh0), I will be building the Robot DIMM part of the system - sending and receiving message and detecting light levels in micropython.
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with. Twitter @scottturneruon
Subscribe to:
Comments (Atom)
-
 In the previous blog posts for this 'series' "It is a good time...." Post 1 looked at the hardware unpinning some of...
In the previous blog posts for this 'series' "It is a good time...." Post 1 looked at the hardware unpinning some of... -
 The Raspberry Pi Foundation recently released a programming activity Alien Language , with support Dale from Machine Learning for Kids , tha...
The Raspberry Pi Foundation recently released a programming activity Alien Language , with support Dale from Machine Learning for Kids , tha... -
 Scratch 3 was launched on 2nd January 2019, so I wanted to know would Webcams still work with Scratch 3 as it did with Scratch 2. For exampl...
Scratch 3 was launched on 2nd January 2019, so I wanted to know would Webcams still work with Scratch 3 as it did with Scratch 2. For exampl...