Social robotics has a research area in Universities for a while, looking into interface with robots that are based around our social cues, or modelling social cues to understand neurodiversity such as Autism. Some great work by companies such Aldebaran Robotics (https://www.aldebaran.com/en) with their Nao and Pepper robots have raised the profile of social robotics.
People like Cynthia Breazeal leading on this:
What I find most exciting is these robots are now they are coming into the home.
OhBot
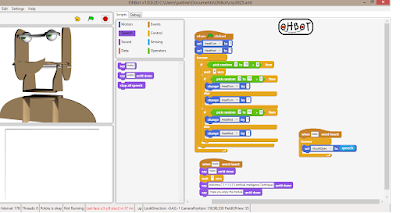
At the entry level in terms of price, and very well featured, is the OhBot (http://ohbot.weebly.com/). This is a is a kit for a robot head with a Scratch-like interface having face-detection, some speech recognition in the current version; controlling several servos to get facial movement. It has provided hours of fun so far (see the video below). This is a great bit of kit for its price.
Jibo
Jibo has been developed by a company headed by Cynthia Breazeal. It is not yet released (end of 2015/beginning of 2016) but the videos make it look very interesting. A stationary robot that seems to be about providing a social interface to many of things we do.
Buddy
A robot soon to be released by Bullfrog Robotics (http://www.bluefrogrobotics.com/buddy-your-companion-robot/) . This is an incredible cute robot.
Related links
It is a good time: 1 Introduction
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.
Sunday 25 October 2015
Saturday 24 October 2015
It is good time 1: Introduction
I have want to write this for a while, a short series of blog posts on why I think this is in an incredible time to be interest in robots and physical computing.
Three posts in the series:
- Introduction
- Small robots
- Social robots
It only takes a quick look on line to see a vibrant and growing network of people who are sharing and supporting each other to use physical computing to do imaginative things. They might go under different names PiJams, Makerspaces, etc but essentially it is about bring people with similar interests (and those are wide) in physical computing together. That is just, physically, but now adding a on-line community that also shares and supports each other you have something that is worth being involved in. If you are unsure what I mean by this have a look at some of the following people's twitter timelines:
@whaleygeek (https://twitter.com/whaleygeek)
@ martinohanlon (https://twitter.com/martinohanlon)
@simonmonk2 (https://twitter.com/simonmonk2)
+Carrie Anne Philbin @MissPhilbin (https://twitter.com/MissPhilbin)
@Makerspaces_com
@TheMagP1
From a very long potential list
Powering all this (apart from drive, enthusiasm, creativity, inventiveness, ....of the people involved) is a number of small devices. Two examples include:
Ok, so what? Why does this matter? My opinion this area is fun to start with, but if you look at the creativity that is going on; new products (that are a mixture of genuinely new ideas, radical refinements or lower costs takes) are being created rapidly. This is exciting.
The next two posts will be about small and social robots emerging at the moment.
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.
Three posts in the series:
- Introduction
- Small robots
- Social robots
It only takes a quick look on line to see a vibrant and growing network of people who are sharing and supporting each other to use physical computing to do imaginative things. They might go under different names PiJams, Makerspaces, etc but essentially it is about bring people with similar interests (and those are wide) in physical computing together. That is just, physically, but now adding a on-line community that also shares and supports each other you have something that is worth being involved in. If you are unsure what I mean by this have a look at some of the following people's twitter timelines:
@whaleygeek (https://twitter.com/whaleygeek)
@ martinohanlon (https://twitter.com/martinohanlon)
@simonmonk2 (https://twitter.com/simonmonk2)
+Carrie Anne Philbin @MissPhilbin (https://twitter.com/MissPhilbin)
@Makerspaces_com
@TheMagP1
From a very long potential list
Powering all this (apart from drive, enthusiasm, creativity, inventiveness, ....of the people involved) is a number of small devices. Two examples include:
- Arduino (see more on these at https://www.arduino.cc/) which are a range of open-source hardware and software components designed for wide use as the basis of physical digital projects (robots anyone?). These are generally low-cost boards and if you go to Kickstarter (https://www.kickstarter.com/) it doesn't take long to find projects and projects that have +Arduino at their core.
- Raspberry Pi (https://www.raspberrypi.org/) is one of the other drivers of this. Essentially a low-cost single board computer developed (and well supported) with the intention of being used to teach basic Computing and potential used in the developing countries. I think it took most people with an interest in physical computing probably less than a second start imagining potential things that can be done with it - and so they went on to prove.
Ok, so what? Why does this matter? My opinion this area is fun to start with, but if you look at the creativity that is going on; new products (that are a mixture of genuinely new ideas, radical refinements or lower costs takes) are being created rapidly. This is exciting.
The next two posts will be about small and social robots emerging at the moment.
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.
Thursday 10 September 2015
Sphero Droid BB-8 on patrol
Sorry not programming this time, but this is a great little toy. An App-control robot from Sphero based on the Star Wars new Sphero BB-8 Droid
One of the other parts of the app include an augmented reality option where on the tablet it appears to be projecting messages and videos (included ones you create).
It is difficult to resist playing with this one.
Thursday 27 August 2015
OhBot and Detecting Faces
With a bit of time off, I had a chance to play with the Ohbot (see Previous related links below) a little more. My son and I played with trying to find could we get it to say hello if there is a face on camera but otherwise make it move randomly as if it was looking.
We based the code on the examples codes that can be found at the OhBot website (http://ohbot.weebly.com/).

The video below shows it in action.
Previous related posts
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.
We based the code on the examples codes that can be found at the OhBot website (http://ohbot.weebly.com/).

The video below shows it in action.
Previous related posts
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.
Sunday 23 August 2015
When is a bug not buggy - CodeBug
When it is a Codebug - a board with 5x5 LED matrix and 4 connectors that can be either inputs or outputs.
- a board with 5x5 LED matrix and 4 connectors that can be either inputs or outputs.

Programming is through a Blockly interface (as above). Code can be tested using the simulator on the left, before downloading to the CodeBug. The site contains a excellent video showing all the steps (see http://www.codebug.co.uk/gettingstarted/ ).

Codebug, Experimenter Kit CODEBUG-EXPKIT
at the moment is usually programmed on-line. There is though a Scratch version in development by Cymplecy (SimpleSi) http://simplesi.net/scratchcodebug-beta-testing/ that is an potential option for off-line programming. It is currently at the Beta testing stage but is good fun to play with.
What is nice about Codebug
and, in fact, most of the Physical Computing device coming out that the moment is the developing community. There is a lot of sharing of projects, ideas and solutions to problems being provide to others through the site (and via Twitter)
I like the Codebug
it is a small, relatively inexpensive device (or will be when it comes on the market- most of the ones out there at the moment are in the hands of those who contributed to the Kickstarter funding). The site (http://www.codebug.co.uk/) is full of useful links, examples and ideas.
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.

Programming is through a Blockly interface (as above). Code can be tested using the simulator on the left, before downloading to the CodeBug. The site contains a excellent video showing all the steps (see http://www.codebug.co.uk/gettingstarted/ ).

Codebug, Experimenter Kit CODEBUG-EXPKIT
What is nice about Codebug
I like the Codebug
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.
Thursday 20 August 2015
Problems First, Second and Third DOI: 10.4018/ijqaete.2014070104

Problems First, Second and Third.
Gary Hill and Scott Turner
DOI: 10.4018/ijqaete.2014070104
DOI: 10.4018/ijqaete.2014070104
Abstract
This paper considers the need to focus initial programming education on problem-solving, prior to the teaching of programming syntax and software design methodology. The main vehicle for this approach is simple Lego based robots programmed in Java, followed by the programming of a graphical representation/simulation to develop programming skills. Problem solving is not trivial (Beaumont & Fox, 2003) and is an important skill, central to computing and engineering. The paper extends the authors earlier research on problems first and problem solving (Hill & Turner, 2011) to further emphasise the importance of problem-solving, problem based learning and the benefits of both physical and visual solutions. An approach will be considered, illustrated with a series of problem-solving tasks that increase in complexity at each stage and give the students practice in attempting problem-solving approaches, as well as assisting them to learn from their mistakes. Some of the problems include ambiguities or are purposely ill-defined, to enable the student to resolve these as part of the process. The benefits to students will be discussed including students' statements that this approach, using robots, provides a method to visually and physically see the outcome of a problem. In addition, students report that the method improves their satisfaction with the course. The importance of linking the problem-solving robot activity and the programming assignment, whilst maintaining the visual nature of the problem, will be discussed, together with the comparison of this work with similar work reported by other authors relating to teaching programming using robots (Williams, 2003). In addition, limitations will be discussed relating to the access to the physical robots and the alternative attempts to simulate the robots using three options of, Microsoft Robotics Studio (MSRS), Lego Mindstorms and Greenfoot simulators.
- Hill, G. and Turner, S. J. (2014) Problems First, Second and Third. International Journal of Quality Assurance in Engineering and Technology Education (IJQAETE). 3(3), pp. 88-109. ISSN: 2155-496 DOI: 10.4018/ijqaete.2014070104
To read a preview of the paper go to: http://www.igi-global.com/viewtitlesample.aspx?id=117560&ptid=91662&t=Problems%20First,%20Second%20and%20Third
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.
Monday 17 August 2015
International partnership pays off for robotics expert Safaa Shwail - defends his PhD thesis
International partnership pays off for robotics expert Safaa Shwail, as he defends his PhD thesis: "Postgraduate student Safaa H Shwail, who studied at both the University of Babylon and University of Northampton, has recently defended his PhD thesis. His work investigated robot pathfinding - how to make robots move at the same time, going to different places, without crashing into each other"
To read more go to: http://www.northampton.ac.uk/news/international-partnership-pays-off-for-robotics-expert-safaa-shwail-as-he-defends-his-phd-thesis
'via Blog this'
If you'd like to find out more about Computing at the University of Northampton go to: www.computing.northampton.ac.uk. All views and opinions are the author's and do not necessarily reflected those of any organisation they are associated with
To read more go to: http://www.northampton.ac.uk/news/international-partnership-pays-off-for-robotics-expert-safaa-shwail-as-he-defends-his-phd-thesis
'via Blog this'
If you'd like to find out more about Computing at the University of Northampton go to: www.computing.northampton.ac.uk. All views and opinions are the author's and do not necessarily reflected those of any organisation they are associated with
Thursday 13 August 2015
OhBot Experiment
As a bit of fun and an excuse to play with the OhBot - I was wondering whether I could get it to produce an introduction to a module when hello is said by the user.
 Features
Features
The video below shows the results.
Related links
Ohbot- social robot
OhBot (http://ohbot.weebly.com/)
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.

- To move randomly with small movements.
- When the word hello is spoken it starts speaking (or appear to).
- Go to a standard starting point initially.
The video below shows the results.
Related links
Ohbot- social robot
OhBot (http://ohbot.weebly.com/)
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.
Monday 10 August 2015
Ohbot a social robot
 I have just finished building an OhBot (http://ohbot.weebly.com/); a robot face (see picture to the left - I fixed the cross-eyes later). This cool little kit actually comes with some very nice software, that includes face tracking and a Scratch-like blocks programming language.
I have just finished building an OhBot (http://ohbot.weebly.com/); a robot face (see picture to the left - I fixed the cross-eyes later). This cool little kit actually comes with some very nice software, that includes face tracking and a Scratch-like blocks programming language.One bit of advice is put as aside several hours to do this, my experience is takes quite a while to build (that might just be me though). It is worth it, when you see the head, eyes, etc moving it is very engaging.

This is nice engaging robot that comes with a user-friendly programming language. The finished robot reminds me a bit of Cynthia Braziel's Kismet robot (http://www.ai.mit.edu/projects/humanoid-robotics-group/kismet/kismet.html) from MIT in the 1990s. So this might also be a good introduction to the area of social robotics and, as at the time of writing this, only £99, a relative inexpensive way into this area.

All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.
Tuesday 4 August 2015
Playing with Tickle and Mini-drone

This was the first time I have actual programmed something that flies and it is quite addictive having something you are controlling being able to move in all directions.
On the left is an example code used, essentially lift off, repeatedly move forward, turn and in the end land.
I wish the mini-drone had a little bit more battery time (I would suggest getting an extra battery). Combining with the drone and the Tickle App does add something to the experience, rather than just control it directly (though that is fun).
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.
Friday 31 July 2015
Lego Mindstorms – Sentry Robots
Sameer Kumar Shrestha, Northampton

The report presents the dissertation on title Prototype of Sentry Robots for Advanced Security which includes the use of LEGO robots showing interaction between each other with the help of wireless communication medium in Bluetooth. The purpose of the work is to build a communication between multiple LEGO robots using the wireless technology. For this task, the NXT version of LEGO Mindstorms has been selected. It is because there is need of complex communication which is possible through wireless medium such as Bluetooth and also a suitable processing device for the proposed task which is present in the LEGO Mindstorms NXT. The report has also focused on the background information about the NXT system and its great flexibility with LeJOS NXJ as the programming platform. The outcome is the implementation of developed work with the use LEGO Mindstorms NXT and the LeJOS NXJ as programming platform. The task was approached with one LEGO NXT robot maintaining the distance between the object in the environment and searching the object by rotating in case of lost. After the completion of the first task, the next task was to study the communication behavior of multiple robots communicating with each other to fulfill the same job. For this, three NXT robots were taken and programmed in such a way that they form the shape of triangle and keep tracking the object. All three of them send and wait for the information from each other and process this information to produce a suitable output, i.e. to respond to the action from each other. Thus, it was found that the implementation of several processes to multiple LEGO based communication had faults, due to the technical hitches with the communication technology and limitations of the NXT systems.
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.
Tuesday 28 July 2015
Picobot - a swarm bot

One of the most interesting small robots on the market is the PicoBot from 4Tronix (http://4tronix.co.uk/blog/?p=708).
These are small, relatively low-cost robots with a good range of basic sensors based around Arduino. A nice feature is they are quick to put together (5-10 minutes each for the two above). The size, time to build and the radio modules make them an interesting option for playing with swarm robotics - if only I had the money.
Don't let the swarm robot idea put you off, as small robots to playing with programming they are good in their own right. Being small with the ultrasonic sensors gives them an non-threatening look; add in they have some build it programs to play with (select by buttons on the bot) to get you going without any programming.
Related Links
All opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.
Sunday 26 July 2015
Narinder's Swarm Robots

Some interesting work has been developed by Narinder Singh (MSc Computing student and Technician) in the Department of Computing and Immersive Technology, University of Northampton. The work revolves around investigating the use of relatively simple robots, kilobots, to investigate swarm robotics.
The kilobots (http://www.k-team.com/mobile-robotics-products/kilobot) are relatively low-cost devices specifically designed for work of swarm/collective intelligence experiments.
Example:Dancing Kilobots
For more examples go to: Kilobot videoss
Supervisor Scott Turner
opinions in this blog are the Author's and should not in any way be seen as reflecting the views of any organisation the Author has any association with.
Subscribe to:
Posts (Atom)
Top posts on this blog in March 2024
The Top 10 viewed post on this blog in March 2024. Covering areas such as small robots, augmented reality, Scratch programming, robots. Micr...
